| 产品特性:速度快 | 是否进口:否 | 产地:东莞 |
| 工作范围:1410 | 品牌:海智 | 型号:HC1410 |
| 关节数量:4 | 订货号:05 | 货号:14 |
| 是否跨境货源:否 |
冲床机械手参数:
型号 | HC1400 | |
轴臂长 | ***+2轴臂长 | 1400MM |
1臂 | 700MM | |
2臂 | 700MM | |
负载 | 10KG | |
运动速度 | ***关节 | 120°/S |
第2关节 | 138°/S | |
第3关节 | 150°/S | |
第4关节 | 150°/S | |
循环时间 | 2.8S | |
本体重量 | 140KG | |
重复定位精度 | ***+2关节 | ±0.08mm |
3关节 | ±0.08mm | |
4关节 | ±0.05° | |
运动范围 | ***关节 | ±170° |
第2关节 | 正10°,负125° | |
第3关节 | 正10°,负95° | |
第4关节 | ±360° | |
电机功耗 | ***关节 | 1500w |
第2关节 | 1000w | |
第3关节 | 750w | |
第4关节 | 400w | |
第四关节允许惯量 | 0.2KGM? | |
本体内部线缆 | 20芯 | |
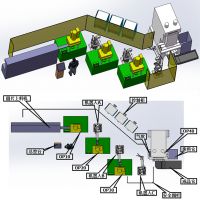
东莞海智机器人自动化公司的冲床冲压机械手介绍:
冲床机械手的虚拟设计
冲床机械手的虚拟设计与仿真系统其实是由两大部分组成,其虚拟设计呈现出如下特点:
(1) 命名规则标准。虚拟产品的设计需要大量跨专业人员的参与。就本文提及的采摘机械手虚拟设计而言,零部件在虚拟产品建模与仿真中的属性命名需要一致、规范。本文所采用的命名规则标准从机械设计和软件设计角度综合考虑,规定了机械手不同零部件中的相同或相似尺寸、功能、材料的零件在程序设计时的命名规则。
(2) 将冲床机械手的特征属性参数化,方便机械手设计各个环节的属性管理,且设计快速化。当用户对某一个零部件进行修改或设计优化时,只需修改其相对应的特征参数。
系统通过实现实时通信来修改和更新设计。如对机械手的某一零部件进行修改,通过程序的人机交互设计界面,对零件的CAD设计图进行修改,修改后通过校对再进行存入数据库。
(3) 冲床机械手的设计知识的重用。用户通过对已有知识的重新组合或部分修改,就能够生成新的设计知识或新的零部件。机械手虚拟设计特点与机械手功能相适应,有利于提高机械手的工作效率。